모빌리티원, 다중수상로봇·드론 통합운영 플랫폼 ‘M1UCS’ 마산해양수산청 납품 완료
대규모 융합로봇 실증사업 성과… 수상·공중 로봇 통합운영 첫 상용화 사례
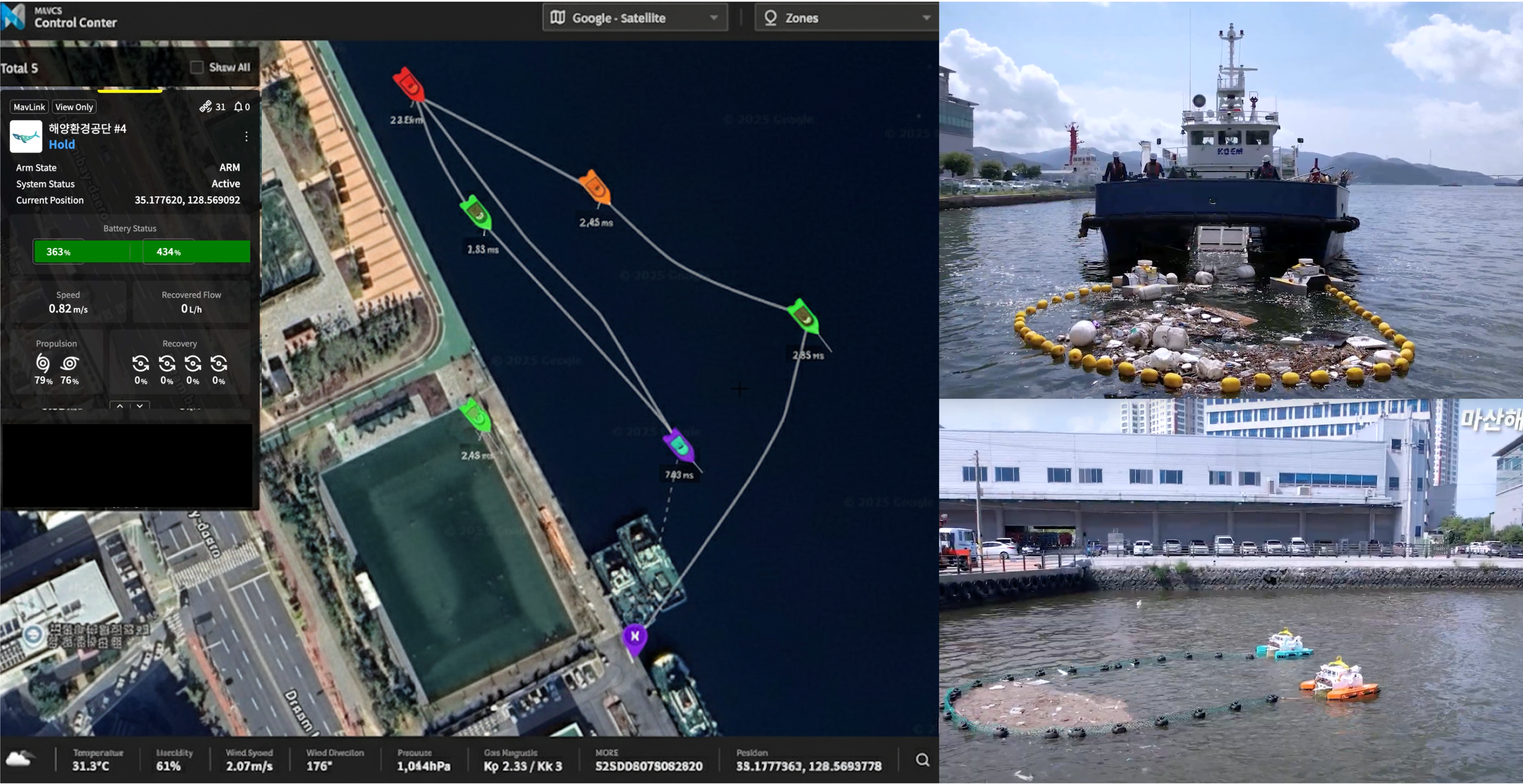
이기종 로봇 통합운영 플랫폼 전문기업 **모빌리티원**은 지난 11월 20일, 다중수상로봇과 드론을 통합 운영할 수 있는 플랫폼 **M1UCS(MobilityOne Unified Control System)**를 해양수산부 마산지방해양수산청에 성공적으로 납품 완료했다고 밝혔다.
이번 납품은 **2024년부터 한국로봇산업진흥원이 주관한 ‘대규모 융합로봇 실증사업’**을 통해 고도화된 기술 성과를 바탕으로 이뤄진 결과물이다. 해당 실증사업은 해양 부유 쓰레기 수거를 목적으로, 수상로봇과 드론을 연계 운용하는 융합 로봇 기술의 현장 적용 가능성을 검증해 왔다.
실증사업은 (주)쉐코, 한국전자기술연구원(KETI), 해양환경공단 마산지사, 그리고 모빌리티원이 컨소시엄을 구성해 공동으로 수행해 왔다. 특히 해당 컨소시엄은 지난 2월, 경상남도와 **‘대규모 융합로봇 실증사업 컨소시엄 업무협약(MOU)’**을 체결하고, 해양 부유 쓰레기 수거를 위한 로봇 시스템의 현장 실증을 본격적으로 추진해 왔다.
이번 마산해양수산청 납품은 모빌리티원의 드론·로봇 통합운영 플랫폼 M1UCS를 수상로봇과 드론의 통합운영에 적용한 첫 상용화 사례라는 점에서 의미가 크다. 이를 통해 해양 환경 관리 분야에서 다중 로봇 기반의 자동화·지능화 운영 가능성이 실질적으로 입증되었다는 평가다.
모빌리티원은 이번 성과를 기반으로 향후 국내 해양 환경 관리, 재난 대응, 스마트 항만 분야는 물론 해외 시장까지 이기종 로봇 통합운영 플랫폼 사업을 본격적으로 확대해 나갈 계획이다.